
Así es queridos lectores! Me he propuesto hacer un UAV, un "bichejo" volador manejado remotamente y cargadito de sensores que lo dotan de cierta independencia. Como es eso? Que es un Geek sin un Quadcopter? Y la experiencia de montarlo, programarlo, diseñarlo, mejorarlo... Enriquecedor como poco...
No te pierdas ni un detalle de este esbozo del proyecto y por supuesto espero vuestro comentarios!
La idea principal es construir un aparato volador, de alto nivel de maniobrabilidad. Como se puede conseguir todo esto? Primero, necesitaremos una fuente de energia que sea capaz de abastecernos de manera eficiente y durante un tiempo lo mas largo posible... Existe! Son las baterias LiPo o baterias de polímeros de litio
Son fuentes de energia altamente eficientes, y que proporcionan unas intensidad impresionantes, superan los 15 A casi siempre, y tienen una duración bastante larga (depende de la descarga).
Necesitaré tambien, unos motores que den la talla, por supuesto, que motores de tamaño reducido pueden dar tanta potencia? Pues amigos, hablamos de motores brushless, unos motores sin escobillas, motores que permiten un nivel muy alto de intensidad para proporcionar unas revoluciones anormes! Capaces elevar masas bastante superiores a ellos y una eficiencia normalmente del 80% o mas! En resumen, maquinas de perfección!
Bastará con conectar las Lipos a los motores? No, porque como ya se ha explicado en otro artículo sobre baterias LiPo éstas requieren una carga y descarga controlada, para ello haremos uso de un invento llamado ESC, o variador de velocidad eléctrica, que nos permite controlar la intensidad transmitida por pulsos PWM!
Que quiere decir esto? Pues que podremos controlar los motores con un arduino o mbed! Así pues ya tenemos la parte física del aparato. Ahora vamos a necesitar sensores, que nos plazcan para darle mas "vista" a nuestro aparato. A pesar de que podemos ponerle lo que queramos, es practicamente imprescindible, uno giroscópio y un acelerómetro, como mínimo. En mi caso planeo ponerle un sensor PING para detectar distancias, y quizás añadirle una mochila GPS para establecer un sistema de waypoints.
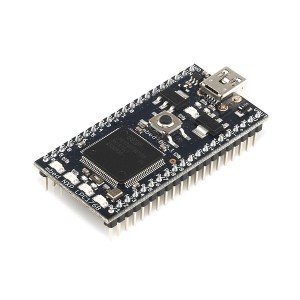
Tras discutirlo con Oscar durante varias conversaciones, he llegado a la conclusión de que el cortex del proyecto tendría que ser un Mbed, por su versatilidad y potencia (un procesador ARM de 32 bits a 60MHz) además de ser mas pequeño que un arduino, mucha mas potencia y capacidad (de un atmega a un ARM 32 bits hay un rato, y los 16 MHz) es mas caro, pero todo lo que requiere potencia, requiere mayor precio... Arduino, tu siempre estas en mi corazón! (L) xDD
Tras esto solo queda decir a los mas Geeks que tengan ganas de montar uno de estos aparatos desde 0, todo mi ánimo y apoyo, en el tiempo en que vaya experimentando con estos componentes, iré loggeandolo todo aqui, en este Blog, para que todos puedan hacer lo mismo.
Opiones, dudas, sugerencias y demás comenten :)
Mas información:
Precauciones con las baterias LiPo
Donde comprar lo necesario?



Por último, agradecer a Oscar, el mantener una tienda y blog como lo es BricoGeek.com, por haberme ayudado a llevar adelante este proyecto y por haber haber sido algo mas que un dependiente de una tienda.
Espero vuestros comentarios!
 Control de seguridad de un motor brushless
Control de seguridad de un motor brushless
 De verdad explotan las LiPo?
De verdad explotan las LiPo?
 Motor brushless casero de 45KW
Motor brushless casero de 45KW
 El BricoCopter!
El BricoCopter!
 El increíble vuelo de un Dron de una sola hélice
El increíble vuelo de un Dron de una sola hélice
 Cómo reducir el consumo del Arduino Pro Mini
Cómo reducir el consumo del Arduino Pro Mini




