Publicado por Oscar Gonzalez
en RobĂłtica
el 18/01/2023
Publicado por Oscar Gonzalez
en RobĂłtica
el 18/01/2023
Todo sen algún momento de nuestra vida maker hemos pensado en diseñar y montar un brazo robot. No será por falta de herramientas como la impresora 3D que permite crear muchos de nuestros proyectos. Pero aunque a nivel teórico suena muy bien, la realidad es bien diferente y siempre se complica la cosa.
Así le ha pasado al autor de éste brazo robot impreso en 3D que a pesar de tener un diseño muy interesante y haber fabricado hasta unaplaca PCB personalizada para la placa de control, le han surgido varios problemas.
Los problemas en un proyecto no son obstáculos, son solo la forma de aprender y cada evz entender mejor cómo funciona la mecánica y la electrónica y en el vídeo que te dejo a continuación lo verás en detalle por si te ronda la cabeza un proyecto de esta magnitud.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 29/12/2022
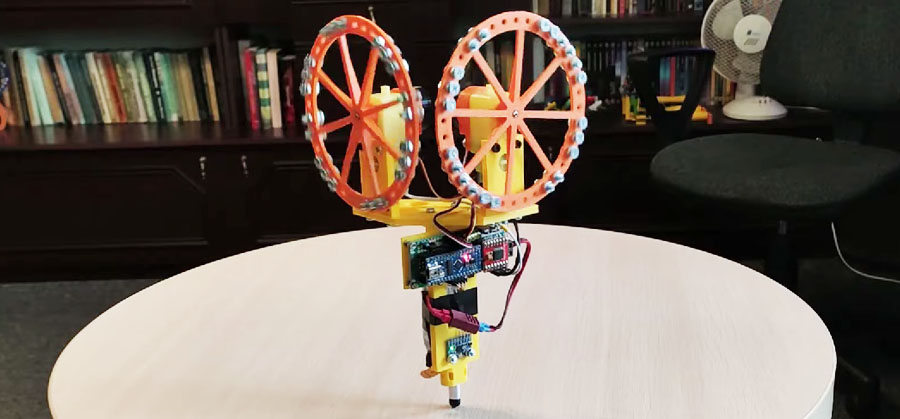
No es ni el primero ni el último robot balanceador que he publicado aquí y la verdad es que es un proyecto intermedio y muy vistoso una vez que lo ves funcionando.
Estos robots miden la inclinación con un acelerómetro y mediante un control PID mueven los motores que a su vez tienen encoders para saber su posición exacta. Lo puedes hacer con motores DC convencionales, pero es mucho más cómodo hacerlo con motores paso a paso como el que te dejo a continuación, ya que no necesitas los encoders, asumiendo que están en la posición correcta.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 27/12/2022
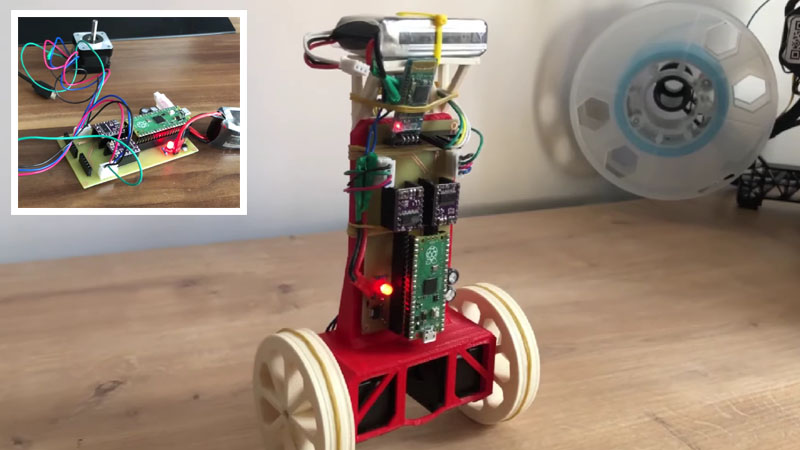
Éste robot es Open Source y se monta con componentes electrónicos baratos. Además, las piezas se imprimen en 3D y utiliza motores DC Dagu que son muy económicos, junto a un Arduino Nano. Con la ayuda de un sensor de inclinación, el resultado es un robot que consigue estar en equilibrio sobre una sola pata.
Es un excelente proyecto para aprender más sobre los sistemas de bucle cerrado y el control PID. Además, toda la documentación está disponible en Github y las piezas en Thingiverse por si quieres montarlo tu mismo.
Te dejo el vídeo y los enlaces a continuación...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 25/12/2022
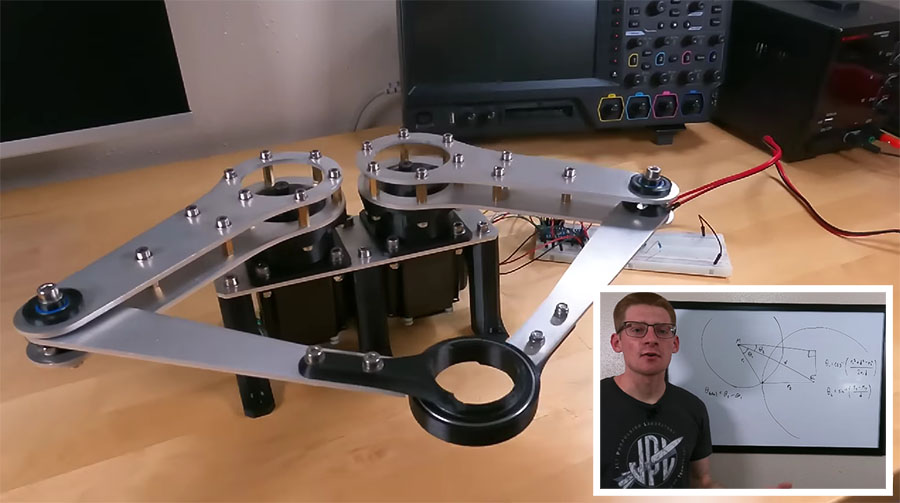
Los robots de tipo SCARA funcionan con dos brazos y en dos dimensiones. Éste tipo de cinemática les permite ser muy rápidos y eventualmente cargar bastante peso. En su esencia, son robots muy sencillos tanto en su diseño como en la mecánica.
Pero la programación de un robot SCARA es algo más complicada ya que hay que calcular la cinemática inversa para que realmente sea útil. Eso implica calcular ángulos y todo tipo de cálculos intensivos, pero un pequeño Arduino Nano puede calcularlos sin problema aunque se quede ligeramente corto.
Levi Janssen nos enseña cómo ha desarrollado, no un robot completo, sino una prueba básica de un robot SCARA con dos motores paso a paso de bucle cerrado con reductora cicloidal y un humilde Arduino.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 18/12/2022
La serie de la clásica familia Addams ahora se emite en Netflix y uno de los personajes más icónicos es la mano. En la serie por supuesto es una verdadera mano con un guante verde para recrear el efecto, pero los productores de la serie han contactado a un estudio de diseño para crear una mano robótica que funcione de verdad para promocionar la serie.
Es bastante complicado hacer un robot con forma de mano que sea capaz de andar, pero aún así el resultado es espectacular y lo puedes ver en el vídeo a continuación...
Leer más