 Publicado por Oscar Gonzalez
en Robótica
el 20/05/2020
Publicado por Oscar Gonzalez
en Robótica
el 20/05/2020
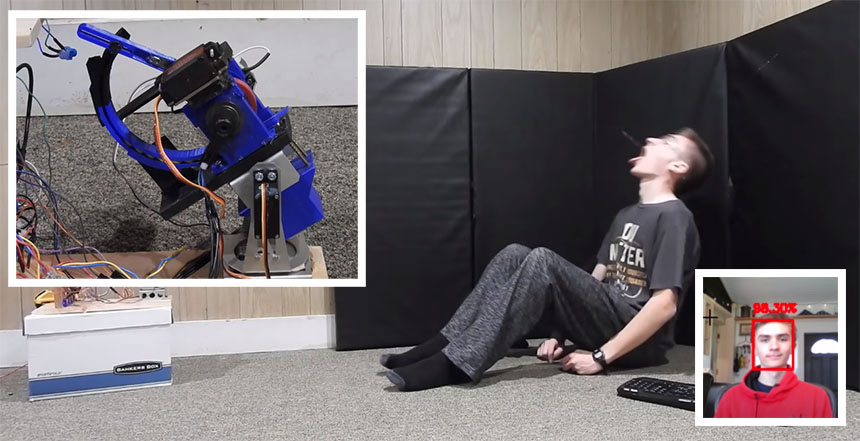
A pesar de que el título de éste post puede ser un poco grande, creo que describe perfectamente el tipo de proyectos que me gustan. Estoy hablando del Over Engineering o eso de cuando un proyecto se te va de las manos y una tarea en principio sencilla se convierte en una obra faraónica y consigue que la diversión por terminar el proyecto sea directamente proporcional (es más divertido hacer algo complejo que algo demasiado sencillo). Aquí el tema se trataba de una torreta para lanzar caramelos M&M. Hasta ahora bien, pero además es capaz de controlar la parábola que traza el pequeño caramelo mediante inclinación y velocidad regulada con la ayuda de un PID. Pero por qué parar aquí si además se le puede añadir una cámara para que reconozca la cara del objetivo y pueda ajustarse automáticamente. Pero si quieres forzar todavía más la máquina, aun queda controlar todo el conjunto con Amazon Alexa y ya lo bordas! :) No os perdáis el vídeo a continuación que no tiene desperdicio.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 14/05/2020
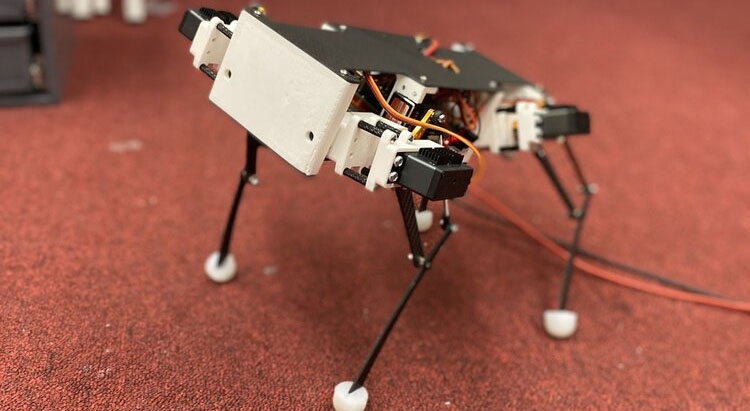
Sin duda, los robots de cuatro patas se han hecho populares gracias a la aparición de Boston Dynamics y en especial su robot Spot. Y no es para menos, son robots con un movimiento muy natural muy similar a un perro por ejemplo. De hecho, ya han aparecido algunas versiones imprimibles y se está creando cierta comunidad entre ellos. Pero no nos engañemos, la dificultad de éste tipo de robots es grande. Unos estudiantes de la Universidad de Stanford han creado un robot cuadrúpedo fácil de construir y acompañado de un software de control basado en Python. Es capaz de andar por supuesto y dado que funciona con una Raspberry Pi, se fácil ampliar sus funcionalidades y tener fuerza de computación suficiente para otras tareas. Para abaratar su coste, se han utilizado servomotores y el resultado es realmente bueno. Has puesto a disposición pública toda la documentación, piezas, CAD y software para que sirva como modelo base y poder evolucionarlo. Os dejo unos interesantes vídeos a continuación de su funcionamiento y los enlaces por si quieres hechar un vistazo o incluso montar el tuyo!
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 13/05/2020
Si eres bueno en ingeniería, serás bueno en lo que quieras, ya lo decía Mark Rober cuando aplicando sus altos conocimientos de ingeniería, ha conseguido ser extremadamente bueno jugando a los dardos. Éste estupendo proyecto se basa en lo mismo pero aplicado al baloncesto. Se trata de que si no eres capaz de encestar la pelota, haz que la pelota enceste siempre! El sistema utiliza un épico mecanismo basado en motores paso a paso junto con una cámara Kinect. Lo que hace es medir y calcular la trayectoria de la pelota y en menos de 400 milisegundos girar la plataforma trasera de la canasta con el ángulo correcto para que entre por el aro. Os recomiendo prestar mucha atención al vídeo que explica en detalle todas las dificultades del proyecto que engloban una buena tonelada de matemáticas como trigonometría, pero también calculo de masas y programación altamente eficiente. No os perdáis el vídeo que no tiene desperdicio.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 13/04/2020
Recientemente Adam Savage ha tenido la oportunidad de tener un robot Spot de Boston Dynamics para probar sus posibilidades. Hasta ahora solo hizo cosas básicas como controlarlo mediante su mando de control remoto, pero desde luego el pequeño Spot puede hacer cosas mucho más complejas. A pesar de los fluido y fácil que parece su movimiento, Spot es capaz de tomar sus propias decisiones aún siendo controlado remotamente. Se puede apreciar en el vídeo a continuación como con simplemente decirle que avance hacia delante, el robot aparta una de sus patas de un obstáculo ya que mapea constantemente su entorno y se adapta de forma automática. También ha probado a subir y bajar escaleras y lo hace estupendamente bien. Tu qué harías con un robot con éste?
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 02/04/2020
Matt Denton es todo unfenómeno en la creación de todo tipo de robots mecatrónicos, de hecho ha participado en la creación del famoso BB-8 de Star Wars y por lo tanto viene de vuelta. Hace ya unos meses, se ha propuesto recrear el robot Droid Build D-O. E sun robot complejo ya solo por el espacio disponible dentro del robot y también por que es un tipo de robot balanceado y eso requiere de una afinación muy precisa del movimiento. A continuación os dejo un vídeo donde explica algunos detalles y lo pone a funcionar.
Leer más


