Publicado por Oscar Gonzalez
en Modelismo
el 14/09/2014
Publicado por Oscar Gonzalez
en Modelismo
el 14/09/2014

Para los que hayamos tenido un coche de radiocontrol, sabemos de sobra que no es un hobby especialmente barato debido normalmente a la cantidad de reparaciones necesarias o simplemente piezas que se desgastan. Por supuesto, eso se agudiza aún más si se compite con algún amiguete en fin de semana. Por otro lado, con el auge de la impresión 3D no sería maravilloso poder imprimir nuevas piezas o incluso realizar mejoras? Por supuesto ya se hace pero este proyecto va incluso más allá construyendo todas las piezas de un coche de radio control para poderlas imprimir todas. Los diseños están disponibles de forma totalmente libre para poder imprimirlo por completo a falta de incorporar la electrónica. Por lo que hemos podido ver en el post original, se utilizan gomas de neumático normales, sin embargo no sería descabellado imprimirlas también con algún tipo de filamento tipo Ninja Flex o similar, aunque habría que ver cuánto rendimiento dan. Desde luego me parece una opción muy interesante!
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 10/09/2014
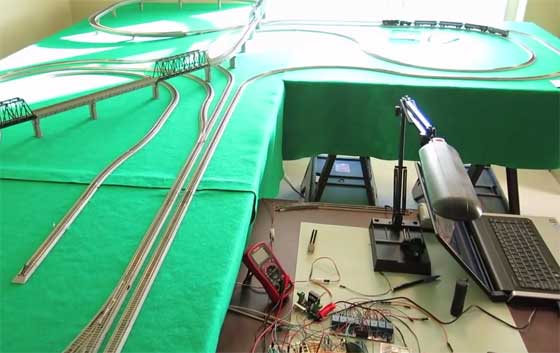
El modelismo ferroviario es un arte en sí mismo y puede llevar meses o incluso años montar una maqueta que replique con fidelidad todos los elementos. En este tipo de montajes, es necesario un control precio para todo tipo de accesorios como pasos elevados, cruces, luces etc y este proyecto que os dejo a continuación utiliza una Raspberry Pi para controlarlo casi todo. Es una muy buena opción ya que al disponer de un pequeño ordenador podemos hacer todo tipo de programas de gestión de la maqueta.
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 24/04/2014
Ir a un concierto siempre está bien, pero si la banda que toca son unos Drones mucho mejor! Eso es lo que va hacer KMEL Robotics que debutará en directo en la Feria de Ciencia e Ingeniería que comenzará el próximo 26 de abril en Washington donde sus pequeños drones tocarán para troda la afición. Esta gente ya tiene bastante experiencia con esto de los drones, de hecho son los responsables de este anuncio de Lexus.
No se si la proximas estrellas del rock serán drones o no pero desde luego no os perdais el vídeo a continuación que no tiene desperdicio!
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 06/09/2012
Hemos comentado por aquí repetidas veces las impresionantes formaciones con quadcopters y alguna maniobra imposible entre otras, sin embargo aquellos ejemplos de control con estos mosquitos voladores aunque son impresionantes de ver, son bastante técnicos de cara a alguien no iniciado en la materia. Cuando se junta el arte y la electrónica, aparecen otro tipo de formas de ver a estos estupendo aparatos tal y como se puede ver en el vídeo que os dejo a continuación, de una formación nocturna de 49 quadcopters que realizan todo tipo de figuras en el cielo. Lamentablemente no hay más detalles acerca de cómo se ha realizado o qué sistemas han utilizado (probablemente GPS) pero el espectáculo es digno de ver.
No os perdais el vídeo a continuación...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 12/07/2012
El amigo José Julio nos envía el resultado de una modificación que hizo a uno de sus quadcopters, el cual ha modificado para darle la apariencia de un coche de Formula 1, en concreto el de Ferrari. El resultado es un proyecto francamente divertido, sin duda una mejora que Ferrari debería introducir en sus monoplazas ;-)
No os perdais el espectacular vídeo a continuación... Gracias José!
Leer más