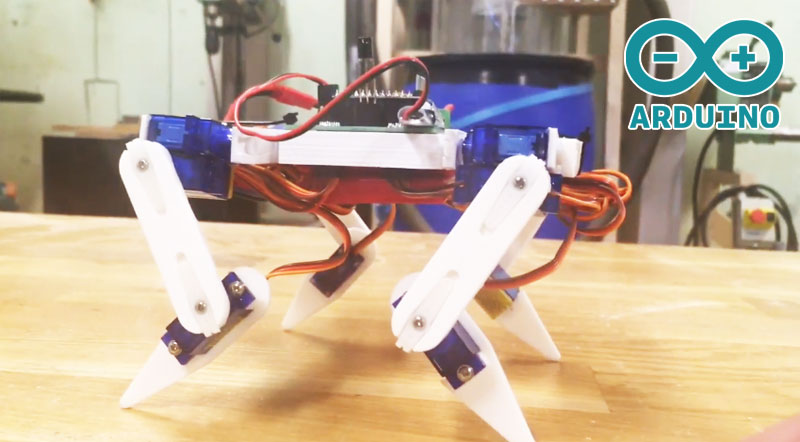
Es muy poco habitual ver robots con cuatro patas como éste que se llama KITtyBot. Más que nada por que realizar movimientos de éste tipo requiere de un código bastante complejo. Éste en concreto está muy bien documentado y está basado en una placa Arduino. Se mueve con relativa soltura y al contrario de lo que se podría pensar, los movimientos de los servos no están predefinos, sino que se calculan los ángulos de movimiento y se sincronizan los servos en tiempo real. Imagínate que cada pata es como un brazo robot donde tienes que calcular la rotación de cada eje a partir de la posición tridimensional de la punta de la pata. Todo esto lo multiplicas por cuatro y más o menos tienes un robot como este. El cuerpo de KITtyBot está impreso en 3D y tan solo utiliza unos servos junto con la placa Arduino. Tampoco es como el LittleDog de Boston Dymanics, pero me parece un robot muy interesante para aprender sobre éste tipo de movimientos. Además es´ta muy bien documentado por si quieres replicarlo.
Enlace: KITtyBot
 Vídeo del descenso del robot Rover Perseverance en Marte de la NASA
Vídeo del descenso del robot Rover Perseverance en Marte de la NASA
 Taller de Arduino en Girona (ERAM)
Taller de Arduino en Girona (ERAM)
 Mando casero para Angry Birds con Arduino
Mando casero para Angry Birds con Arduino
 El robot QBO hace grandes progresos utilizando SLAM
El robot QBO hace grandes progresos utilizando SLAM
 James Bruton desarrolla un nuevo chasis con nuevas patas para su robot Open Dog
James Bruton desarrolla un nuevo chasis con nuevas patas para su robot Open Dog
 Visita de la fábrica de Arduino en Italia
Visita de la fábrica de Arduino en Italia