Publicado por Oscar Gonzalez
en RobĂłtica
el 29/03/2018
Publicado por Oscar Gonzalez
en RobĂłtica
el 29/03/2018
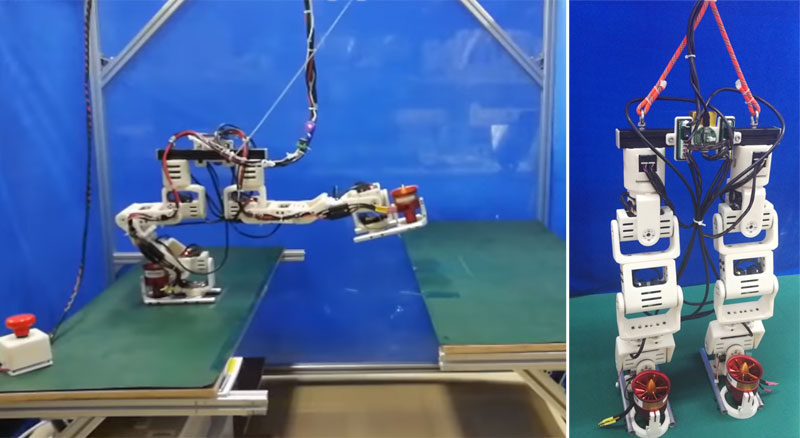
Los robots bípedos molan mucho pero por su propio diseño tienden a ser inestables. En la Universidad de Guangdong de China, unos científicos tuvieron la genial idea de experimentar con un nuevo sistema poniendo unas potentes turbinas en los pies del robot. De esta manera cuando algún pie no encuentra nada debajo suyo, se activan y estabilizan el robot. Además, si continúan mejorando el sistema, quizás pueda incluso despegar del suelo y volar a lo loco, quién sabe!
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 04/05/2017
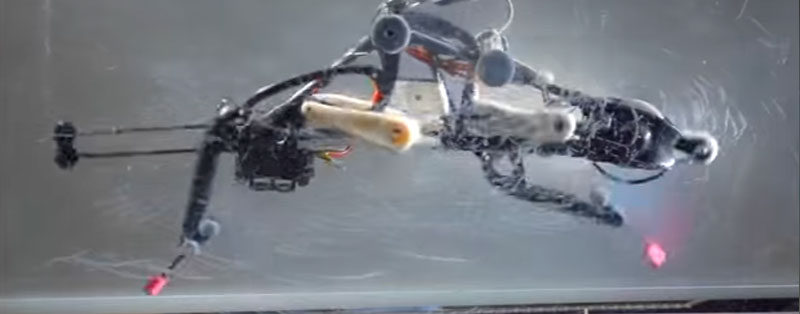
Ahí donde lo ves, éste robot llama la atención por ser un bípedo pero eso no es todo, ya que solo utiliza un motor para controlar las dos patas y además no dispone de ninguna electrónica de control ni sensores que lo mantengan estable. Es el propio diseño que hace que se mantenga en equilibrio y pueda alcanzar una velocidad de casi 20 kilómetros por hora. Una de las desventajas es que no puede girar pero es un diseño muy interesante.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 11/04/2016
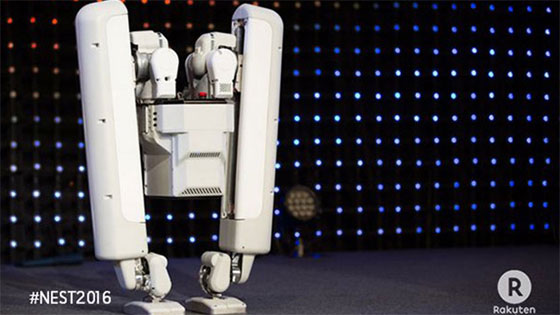
Parecía que Google, o más bien Alphabet, quería deshacerse de su división de robótica cuando ha anunciado que iba a dejar de lado a Boston Dynamics, pero parece que no han dejado del todo de trabajar en robots y lo han demostrado enseñando al mundo una nueva creación que por el momento no tiene un nombre definido.
El cofundador y consejero delegado de SCHAFT, Yuto Nakanishi, mostró cómo el robot es capaz de subir escaleras, cargar con un peso de 60kg y andar sobre terreno desnivelado sin perder el equilibrio. Una de las novedades es que es capaz de analizar lo que va a hacer antes de actuar. Además el planteamiento motriz que tiene este robot me parece muy interesante ya que han apostado por algún tipo de sistema de desplazamiento lineal junto con articulaciones lo que lo hace muy estable.
Lo que no tiene precio, es que Yuto fue a la presentación con una camiseta del Barça, rollo puto amo nivel dios que le importa todo muy poco ;)
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 10/02/2012
Así de primeras se vé simpático pero como todo buen Geek no puedo dejar de pensar en la complicación técnica que supone que un pequeño robot bípedo pueda darse unas carreras en bicicleta. Si lo pensamos bien, hay muchos factores a tener en cuenta. Lo primero y más obvio es la gestión del equilibrio que probablemente se ayude de alguna combinación de acelerómetro y giroscópio (o quizás solamente un acelerómetro). Lo segundo que me llama la atención es el calculo de todo el movimiento circular de las piernas para poner pedalear. Sin duda un trabajo impecable. Fijaros bien en el vídeo ya que incluso es capaz de arrancar desde parado y además funciona con control remoto. No tiene desperdicio...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 25/08/2011
Los robots bípedos tienen algo especial ya que el reto de hacerlo caminar puede llegar a ser realmente difícil. MiniMechadon es un pequeño robot bípedo que tiene la peculiaridad de estar pensado, no para reproducir movimientos pregravados, sino que está diseñado para aprender a caminar. Gracias a un conjunto de sensores en sus patas y cabeza, su diseño permite elaborar algoritmos de prueba/error. Es un robot algo antiguo, de hecho se ha realizado en el año 2003 basandose en un sencillo PIC 16F819, pero su diseño es realmente espectacular, especialmente el diseño de la cabeza con varias placas soldadas entre sí. La web del autor no tiene desperdicio ya que también podemos ver otros impresionantes robots.
No os perdais las imagenes y enlace a continuación... Gracias José Miguel!
Leer más