Publicado por Oscar Gonzalez
en RobĂłtica
el 10/12/2010
Publicado por Oscar Gonzalez
en RobĂłtica
el 10/12/2010
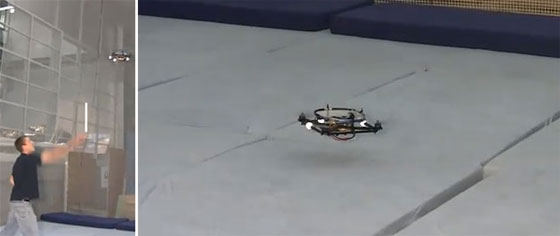
Seguramente recordareis aquellas maniobras imposibles con un Quadcopter que hemos publicado hace algún tiempo. En aquel video se mostraba como unos pequeños quadcopters eran capaces de hacer giros programados evitando obstáculos con una precisión milimétrica. Pues bien, aqui os dejo otro video que muestra como el mismo equipo ha conseguido hacer que el quadcopter haga saltar una pequeña pelota sobre sí mismo de forma controlada.
El video os puedo asegurar que no tiene desperdicio...
Leer más
Publicado por Oscar Gonzalez
en TecnologĂa
el 23/11/2010
Estás buscando qué regalar o qué regalarte para éstas próximas novedades? Un buen candidato quzás sea el AR.Drone de Parrot, un pequeño quadcopter que se pilota con iPod/iPhone y que incorpora realidad aumentada por lo que podemos jugar entre varios jugadores. Por supuesto siempre es mejor hacerselo uno mismo, pero no os perdais el impresionante video a continuación...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 14/10/2010
No os perdais éste impresionante Octocopter casero hecho integramente desde cero. Lamentablemente, no hay información extra de cómo se ha hecho, pero merece la pena verlo volar!
No os perdais los videos tras el salto...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 29/09/2010
Realmente me he quedado pasmado al ver éste video. Se trata de un Dodekacóptero casero fabricando por Sinver en Zaragoza (España). Es básicamente el mismo principio que un quadcopter o hexacopter (como los que ya hemos visto anteriormente por aqui) pero éste tiene 12 motores brushless. Lamentablemente no hay más información sobre éste interesante proyecto, pero con 12 motores eso tiene que ser un monstruo de consumo y devorar baterías como panecillos... :)
Que opinais? tiene realmente ventajas, salvo la estabilidad y redundacia con 12 motores? Queda abierto el debate y por supuesto os dejo el obligado video a continuación...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 31/05/2010
No os perdais éste impresionante proyecto llamado NanoCopter. Se trata de un pequeño quadcopter de apenas 15 gramos de peso y con una fuerza de empuje de unos 25 gramos. Es tán pequeño que su cuerpo está formado por la placa de circuito impreso y cabe en la palma de la mano. Para su control utiliza un microcontrolador Silabs 8051F411 que se encarga de procesar los datos de un giroscopio IDG500 y un acelerómetro ADXL335 para estabilizarlo mediante un control PID. Por otro lado un pequeño Attiny13 vela por el nivel de batería, el encendido y el apagado de los motores mediante una pequeña etapa MOSFET. Tiene cuatro pequeños motores X-Twin que son alimentados por una pequeña batería LiPo de tan sólo 230mAh.
El hilo del foro donde lo estan publicando es muy interesante ya que se hicieron dos revisiones del chasis e incluso han analizado la vibración del conjunto mostrando ciertas gráficas y así poder mejorar la estabilización. Un diseño muy elegante y toda una obra de ingeniería. No os perdais el video y el obligado enlace a continuación!
Leer más