Publicado por Oscar Gonzalez
en DIY
el 13/04/2011
Publicado por Oscar Gonzalez
en DIY
el 13/04/2011
Recientemente han aparecido unos cuantos proyectos de quadcopters muchos de los cuales he ido publicando aqui. Es un proyecto muy interesante ya que aparte del reto que supone hacerlo volar de forma estable tanto a nivel de hardware como de software, luego podremos disfrutar a lo grande usandolo en cada momento libre que tengamos. Como todo en este mundo, no es un proyecto precisamente fácil como bien sabe nuestro colaborador Andoni que está actualmente realizando el suyo. Os dejo por aqui unas pruebas de unos chavales que estan haciendo también el tuyo. Fijaros en el sistema que utilizan para hacer la prueba de forma segura, consiste en un hilo el cual sujeta al quadcopter. De esta forma, en caso de fallo, no se irá muy lejos o lo que es peor, no cortará ninguna cabeza... :)
No os perdias el video...
Leer más
Publicado por Andoni Diaz Puerta
en Modelismo
el 01/04/2011
Tras este tiempo de trabajo, planificación, recolección de ideas, colaboraciones y sobretodo un buen curro, ya tengo una lista oficial de los materiales e ideas principales del quadcopter, además de un un prototipo que pronto podremos ver volando!
Se han realizado unas cuantas modificaciones al proyecto, como por ejemplo, el uso de ArduImu en lugar de Mbed.
Si no quieres perderte un detalle, o como muchos quieres construirte uno de estos aparejos voladores, te recomiendo que además de este post, visites los anteriores relacionado y la wiki oficial del proyecto.
No te pierdas ni un solo detalle!
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 29/03/2011
Los ingenieros del ETH en Zürich (Suiza) han hecho todo tipo de experimentos con pequeños quadcopters orientados al control de sistemas dinámicos, los cuales he ido publicando por aqui para el gozo de todos nosotros. Ahora bien, despues de varios proyectos realmente impresionantes parece ser que han subido el liston aún más si cabe y ahora han hecho que se pueda jugar al juego Ping Pong entre uno mismo y el quadcopter o incluso dos quadcopter solos...
El experimento forma parte del Flying Machine Arena, una iniciativa conjunta de varios laboratorios de investigación, y que dispone de un costosísimo (~0.5M€) sistema de captura de movimientos que proporciona la posición 3D de una serie de reflectores colocados en los quadrotors con una precisión cercana al milímetro. Ahora a ver quien se anima a hacer lo mismo con Arduino... espero comentarios! hehe
Como siempre, no os perdais el video a continuación... Gracias Carlitos!
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 24/03/2011
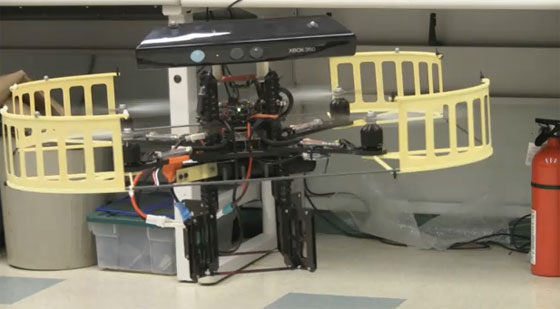
Desde la salida del driver de libre OpenKinect se han visto ya muchas aplicaciones utilizando este maravilloso sensor. Una de sus aplicaciones encuentra lugar aquí, en un proyecto llamado STARMAC del laboratorio de sistemas híbridos de la Universidad de Berkeley en California. Se trata de un pequeño quadcopter que mediante un sensor Kinect es capaz de procesar la imagen y conseguir desplazarse de forma autónoma. Todo el calculo y procesamiento se realiza en el mismo quadcopter mediante una placa base con un procesador Intel Atom 1.6 GHz functionando, como no podía ser de otra forma, con Linux (Ubuntu 10.04).
No os perdais el alucinante video a continuación...
Leer más
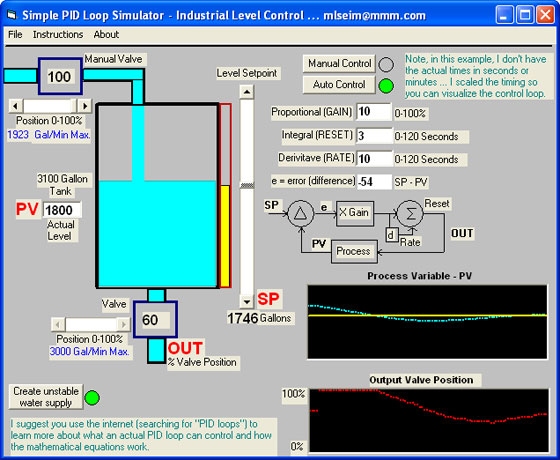
Si estás desarrollando un quadcopter pero te encuentras ya con el "problema" de la calibración del control PID estás de suerte. He encontrado un interesante enlace al código fuente de un pequeño programa hecho en Visual Basic 6 que muestra en todo su esplendor cómo funciona un control PID.
Un PID (Proporcional Integral Derivativo) es un mecanismo de control por realimentación que calcula la desviación o error entre un valor medido y el valor que se quiere obtener. Es básicamente lo que se utiliza para la estabilización de quadcopters, hexacopters etc. Para entender cómo funciona y sobre todo cómo reacciona cambiando sus parámetros de control, la aplicación simula un tanque con una entrada de líquido, una salida y un nivel de líquido que queremos mantener. En función del calculo y modificación de las tres variables del PID (Proporcional, Integral y Derivada), podremos ver las distintas respuestas del algoritmo y entenderemos qué hace cada parámetro. Es interesante ver la respuesta del ciclo de llenado/vaciado según vamos modificando las variables y nos puede dar una idea de la respuesta que queremos para nuestro objeto volador.
No os perdais el enlace y ya me contareis qué tal! ;)
Leer más