Publicado por Oscar Gonzalez
en General
el 05/10/2023
Publicado por Oscar Gonzalez
en General
el 05/10/2023
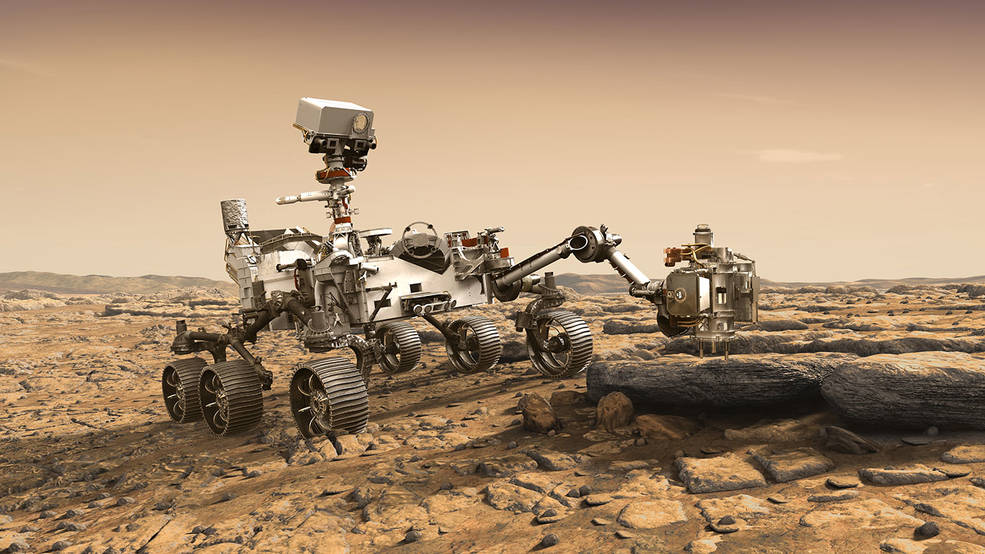
Algunos proyectos te hacen saltar automáticamente la chispa de querer hacerlo y éste es uno de esos. Se trata de una réplica funcional del Mars Perseverance Rover, el robot que actualmente está explorando las tierras de Marte desde su aterrizaje en febrero de éste mismo año después de su épico aterrizaje.
Éste no es tan avanzado por supuesto, pero es una réplica a escala 1:4 que se puede pilotar con un mando de radiocontrol. El corazón del robot es un Arduino Mega 2560 que permite controlar sus 6 motores. La base del chasis está diseñada a partir de perfil de extrusión 2020 y todo lo demás impreso en 3D. Son un montón de horas de impresión y filamento, pero el resultado final es realmente increíble. Además, ¿quién puede resistirse a tener un Mars Rover paseando por el jardín?
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 16/12/2020
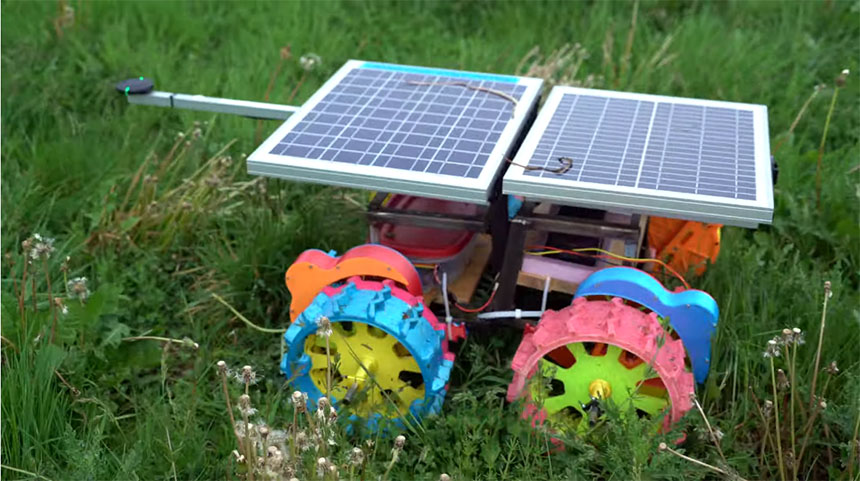
Igual la escala del robot no se aprecia, pero es sustancialmente grande y efectivamente, una gran cantidad de piezas están impresas en 3D. Me ha gustado mucho el sistema de tracción de las ruedas con piñones planetarios de gran reducción que le proporcionan una enorme fuerza, aunque por supuesto pierden mucha velocidad. La idea del creador de éste robot trata de poder alimentarlo con energía solar y dejarlo funcionando en el jardín durante semanas. Es también interesante ver al final el estado de deterioro del robot y sobre todo cómo has terminado las piezas impresas después de semanas de uso en exterior.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 14/09/2020
FPV son las siglas inglesas de First Person View o lo que sería lo mismo, vista en primera persona. Es como si estuviésemos montados dentro del aparato en cuestión y vaya aparato éste pequeño robot rover, ideal para viajar por tu jardín sin levantarte de la silla! Monta una cámara en el frontal y tanto el chasis como las orugas están impresas en 3D. Es realmente increíble la cantidad de detalles sobre el montaje que ha escrito el autor para que todo aquel que quieras montar un rotot Rover explorador con cámara FPV pueda hacerlo.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 08/06/2020
En Julio de éste año se lanzará el nuevo robot Rover Perseverance de la NASA con dirección al planeta rojo Marte. Estará cargado con muchos instrumentos de última generación para poder estudiar en profundidad la superficie de planeta. Además, pretenden que pueda almacenar muestras para que futuras misiones puedan recuperarlas y traerlas a la tierra para un análisis más profundo. Como podrás ver en el vídeo que te dejo a continuación, el Rover Perseverance dispone de un micrófono que le premitirá escuchar los ruidos de Marte, los vientos, los diferentes aparatos golpeando la superficie mientras excava y quién sabe qué mas!
Leer más
Publicado por Oscar Gonzalez
en DIY
el 04/10/2018
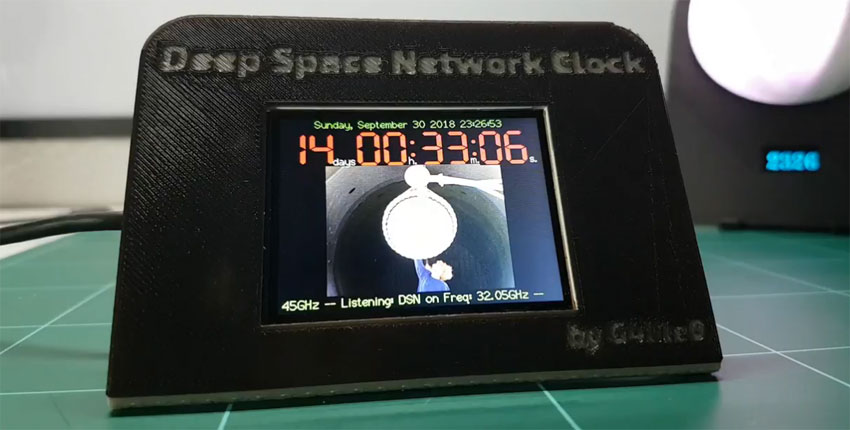
Qué proyecto más maravilloso creado por nuestro amiguete G4lileo. Se trata de un reloj Wifi conectado a la DSN de la NASA. DSN son las siglas de Deep Space Network y es la red que utiliza la NASA para comunicarse con el exterior del planeta. Consta de tres potentes antenas repartidas por el globo. Una en Camberra (Australia), otra en Goldstone (Estados Unidos) y la tercera en Madrid (España). De ésta manera la rotación de la tierra no afecta a éste canal de comunicación. Sigue leyendo a continuación que éste proyecto no tiene desperdicio.
Leer más