Publicado por Oscar Gonzalez
en Robótica
el 25/09/2019
Publicado por Oscar Gonzalez
en Robótica
el 25/09/2019
Los robots de Boston Dynamics no dejan de sorprendernos y sobre todo Atlas, aquel robot que hace Parkour tan pancho. Ésta vez nos traen otro vídeo dando saltos y volteretas tan alegre que hasta parece divertido. Ahora le pones una escopeta en las manos y ya no parece tan divertido... :) La verdad es que Atlas haciendo Parkour y Spot mini bailando hacen muy buena pareja!
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 17/09/2019
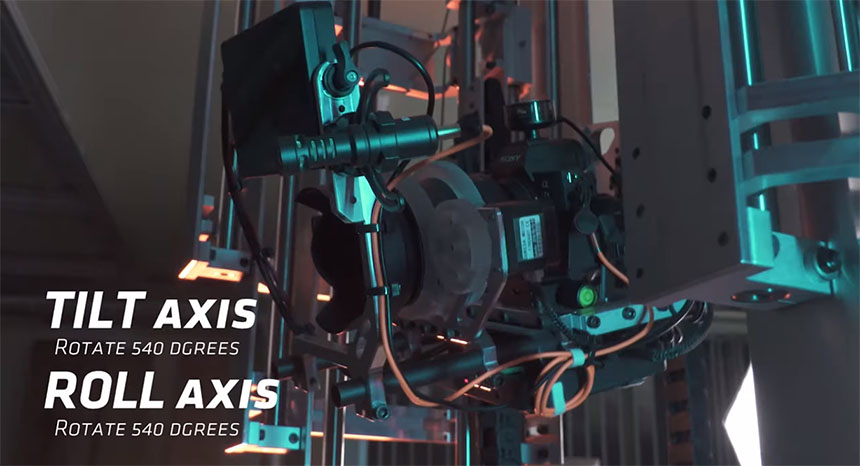
Hay quien se monta un slider monitorizado para hacer unos planos molones con su cámara reflex y de hecho he publicado unos cuantos por aquí. Luego le añades unos ejes y lo controlas con Dragonframe como hizo Edu Puertas para hacer stopmotion. Luego está éste hombre, que muy probablemente tiene poca vida social y no anda como nosotros vacilando en redes sociales todo el día, a quien se le ha ido completamente de las manos y se ha montado un lo que es probablemente el gimbal motorizado más épico que verás en mucho tiempo. Se trata de una enorme estructura colgada del techo de 4 metros por 6 metros, en la que cuelga una estructura totalmente de aluminio con múltiples ejes de rotación. También controla el sistema con un mando inalámbrico y Dragonframe. En el vídeo enseña parte del proceso de construcción y tampoco es para menospreciarlo ya que utiliza el kit completo del maker en modo Leyenda con toda la carne en el asador: Fresado CNC con aluminio, impresión FDM, impresión en resina para poleas, tornos y varias técnicas de mecanizado del metal... ahí es nada.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 29/08/2019
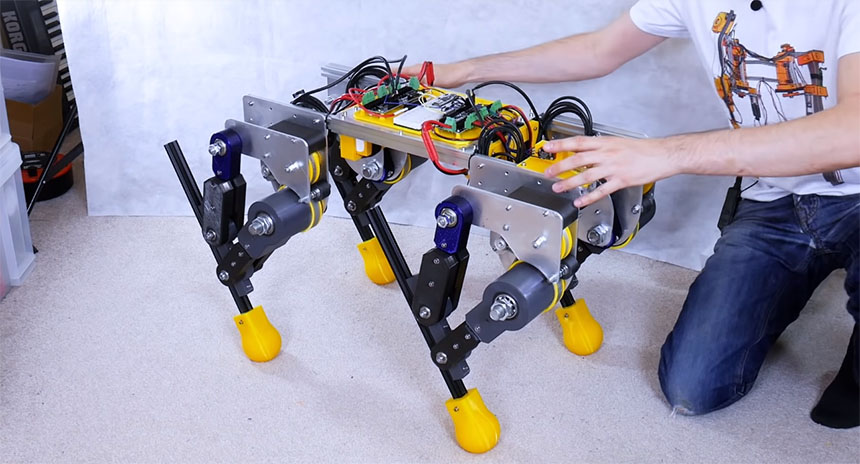
Seguramente te ha pasado alguna vez que te metes en un proyecto muy grande, que exige una gran cantidad de recursos tanto financieros como de tiempo. Esos proyectos molan mucho, pero llega un momento donde te puedes encontrar en un punto donde todo se te queda todo muy grande o se complica demasiado y no llegas a ver el final nunca. De hecho lo más probable es que no lo termines y quede abandonado. Hace ya meses que James Bruton se ha embarcado en construir un robot cuadrípedo llamado Open Dog y desde luego no es moco de pavo. Aún así y debido a que "solo" le falta hacerlo caminar correctamente, ha sacado tiempo de donde no existe para construir otra pequeña réplica con otro sistema diferente en las patas como prueba de concepto. Su objetivo actualmente es poder darle escobazos a lo Boston Dynamics y que se mantenga de pie, casi nada. Quizás algún día llegue a bailar como Spot Mini, quién sabe. De esa forma puede mejorar todo el sistema para finalmente implementarlo en su robot principal Open Dog.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 23/08/2019
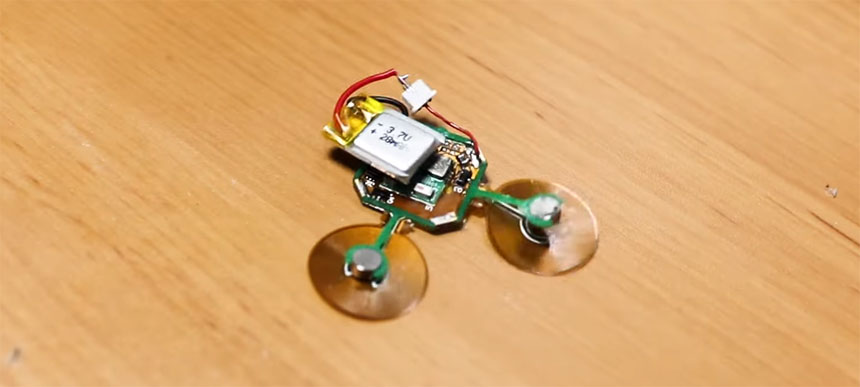
No te pierdas éste pequeño robot de apenas 5 gramos batería incluida y que puede comunicarse por Bluetooth. Su autor Carl Bugeja ha creado un sistema de movimiento con patas que funcionan con una PCB flexible que se mueve con electroimán. Jugando con la posición de la batería y la frecuencia y cadencia de los movimientos de las patas, puede desplazar el robot en varias direcciones. Muy original y épico vídeo donde explica todos los problemas que se ha encontrado mientras creaba éste pequeño robot.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 01/08/2019
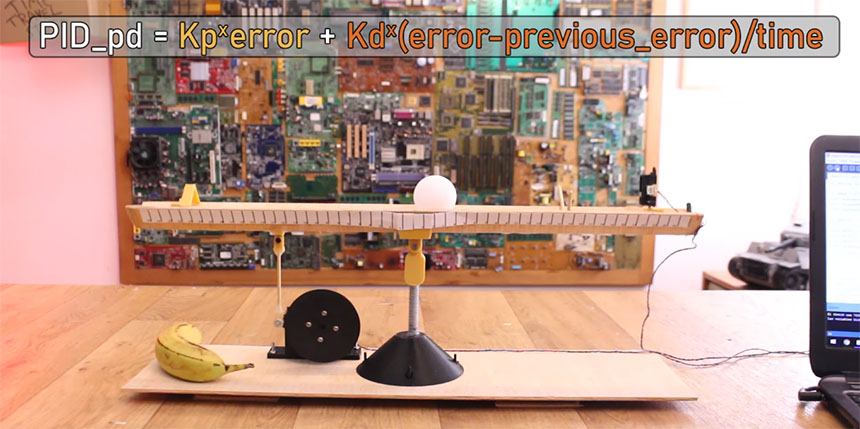
El control con realimentación PID es extremadamente útil y se usa en infinitas aplicaciones. En su esencia, calcula la desviación o error entre un valor medido y un valor deseado. Con esto se puede controlar de forma eficaz drones, robots sigue líneas o la temperatura de la cama caliente de tu impresora 3D por ejemplo. Se trata de un algoritmo con tres factores principales: Proporcional, Integral y Derivada. Que no cunda el pánico al leer sobre derivadas e integrales, ya que si entiendes bien cómo funciona el algoritmo PID, no te será complicado implementarlo en tu siguiente proyecto. En el vídeo que te dejo a continuación se muestra un ejemplo utilizando una bola de ping pong que debe mantenerse estable sobre una plataforma en movimiento. Ahora es cuando te das cuenta de que aquel primer año de la carrera de ingeniería haciendo derivadas en integrales como si no hubiese un mañana, por fin tiene sentido... ;)
ACTUALIZACIÓN: Gracias a David Pereira, os dejo también otro vídeo explicativo en Español sobre el funcionamiento del sistema PID con ejemplo práctico.
Leer más